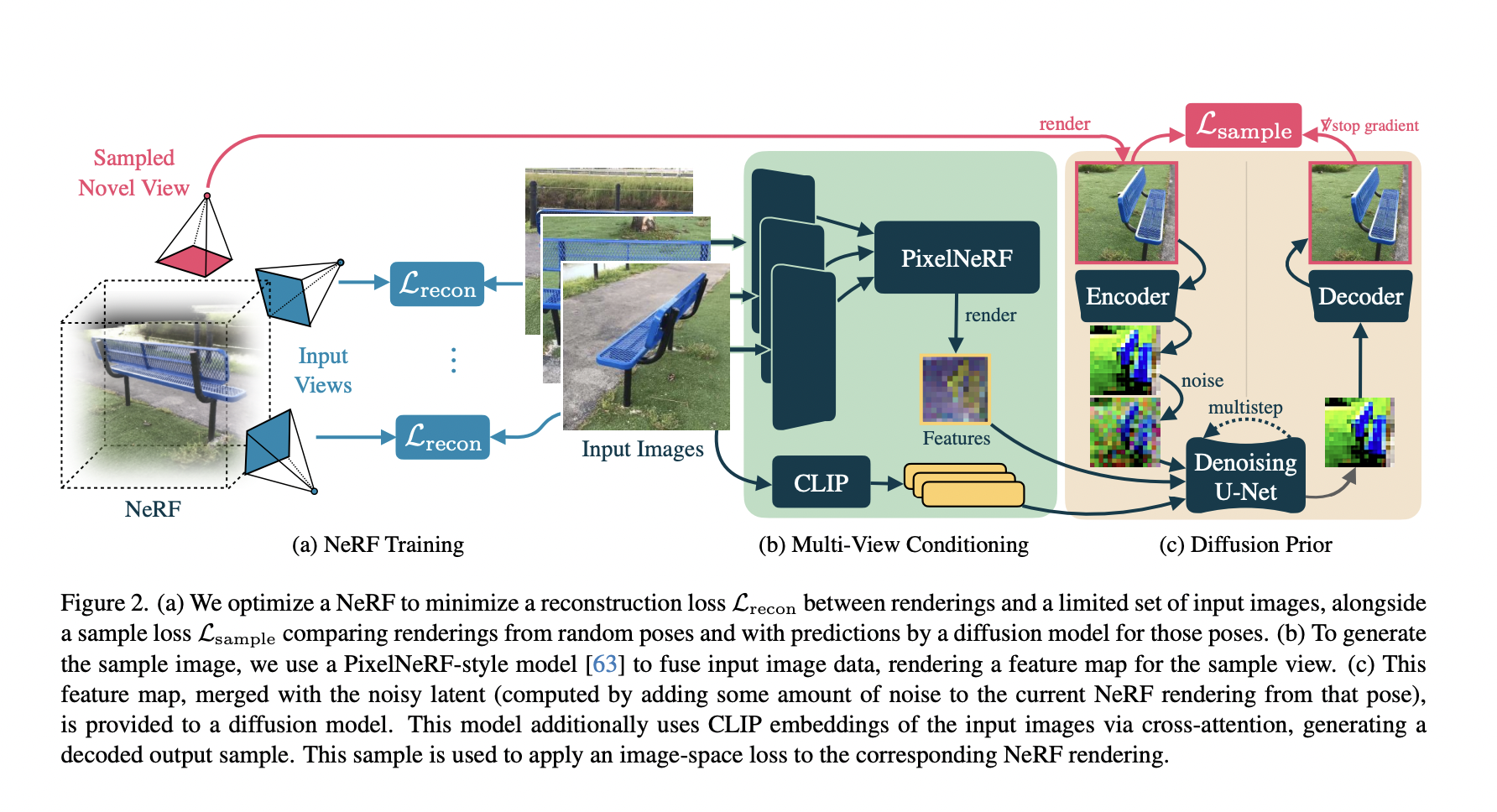
How can high-quality 3D reconstructions be achieved from a limited number of images? A team of researchers from Columbia University and Google introduced ‘ReconFusion,’ An artificial intelligence method that solves the problem of limited input views when reconstructing 3D scenes from images. It addresses issues such as artifacts and catastrophic failures in reconstruction, providing robustness…